Roboții și lupta cu rufele: Când inteligența artificială se împiedică de o cămașă mototolită
În ciuda progreselor impresionante în robotică și inteligența artificială, roboții se confruntă cu dificultăți majore în îndeplinirea sarcinilor considerate simple de oameni, precum plierea hainelor. Această aparentă discrepanță ilustrează „paradoxul lui Moravec”, conform căruia sistemele robotice pot excela în domenii complexe precum calculul, dar se luptă cu activitățile cotidiene. Manipularea obiectelor flexibile, cum ar fi textilele, reprezintă o provocare majoră.
Dificultățile în automatizarea plierii
Procesul de pliere a hainelor, aparent simplu, implică o serie de etape complexe. Roboții trebuie să detecteze contururile, să localizeze elemente specifice, precum mânecile, să evalueze proprietățile țesăturii și să ajusteze forța de apucare. Toate acestea trebuie realizate într-un ritm continuu. Principalul obstacol este natura maleabilă și imprevizibilă a materialelor textile. Spre deosebire de obiectele rigide, textilele își modifică constant forma, ceea ce îngreunează perceperea și manipularea lor de către roboți.
O bluză de bumbac, o cămașă de mătase sau un hanorac voluminos se comportă diferit la atingere și în timpul procesului de împăturire. Oamenii percep intuitiv textura, densitatea și flexibilitatea materialului, ajustându-și automat forța și mișcările. Roboții, în schimb, trebuie să interpreteze aceste caracteristici variabile prin senzori și algoritmi complecși. Orice schimbare neașteptată poate duce la eșecul operațiunii.
Provocări pentru roboți: Vedere artificială și algoritmi
Majoritatea prototipurilor experimentale folosesc sisteme de recunoaștere vizuală pentru a identifica punctele de apucare și a iniția mișcări predefinite. Dificultatea apare atunci când țesătura se deformează într-un mod neașteptat. Aceasta conduce la o pliere inexactă. O altă abordare implică segmentarea acțiunii de pliere în micro-mișcări secvențiale, permițând robotului să ajusteze gradual eventualele abateri. Această tehnică reduce erorile, dar nu rezolvă complet problema.
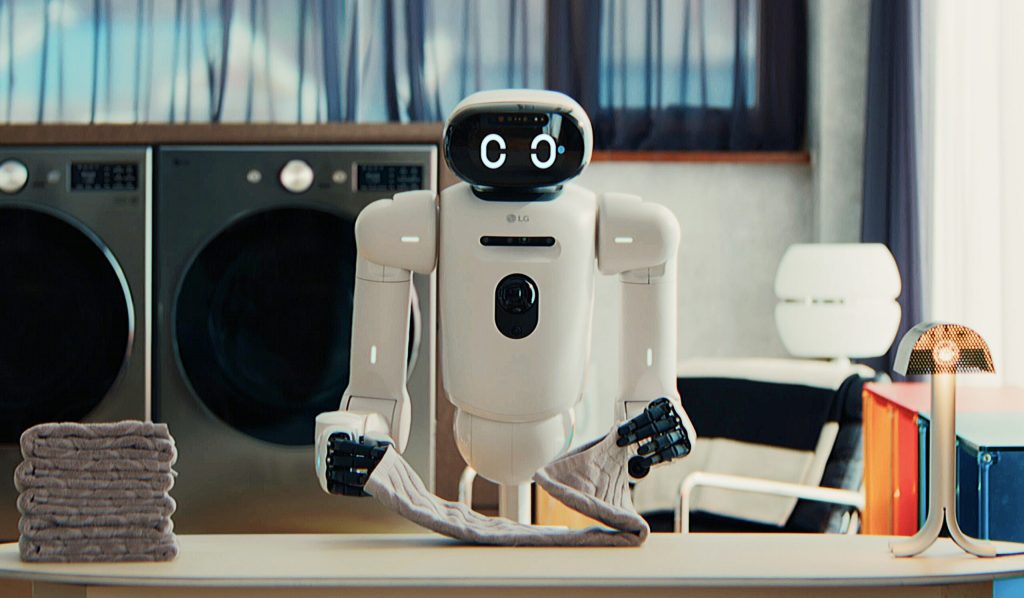
Companii importante, precum LG, au prezentat la expoziții tehnologice prototipuri de roboți umanoizi care pot face activități casnice, inclusiv plierea hainelor. Demonstrațiile concrete au arătat însă că nivelul actual al tehnologiei este încă cu mult sub dexteritatea umană. Progresele recente în inteligența artificială și învățarea automată generează speranțe, cercetătorii estimând că această discrepanță s-ar putea reduce în următorii ani. Evoluția rapidă a integrării dintre senzori de ultimă generație și algoritmi adaptivi ar putea oferi roboților o mai bună capacitate de a manipula obiecte flexibile.
Actul de a plia haine scoate în evidență o concluzie fundamentală: ceea ce pentru oameni este o activitate cotidiană, din perspectiva ingineriei implică o interacțiune complexă de procese. Până când roboții vor putea transforma simplu un morman de rufe într-un teanc ordonat, această sarcină va continua să servească drept reper pentru evaluarea capabilităților și limitelor inteligenței artificiale și ale roboticii.
Sursa: Mediafax